
I am currently a postdoctoral scholar at the UCLA Mobility Lab. Starting in Fall 2026, I will join North Carolina State University (NCSU) as an Assistant Professor, where I will launch the PARIS Lab (Physical AI, Robotics, and Intelligent Systems Lab). Previously, I was a research intern at the NVIDIA Research Autonomous Vehicle Group and a visiting student researcher at UC Berkeley in the Mechanical Systems Control (MSC) Lab. I earned my Ph.D. from Nanyang Technological University (NTU), where I conducted research in the Automated Driving and Human-Machine System (AutoMan) Lab.
My research lies at the intersection of intelligent systems, robotics, and physical AI. I develop generalizable algorithms and systems that enable physical intelligent agents to perceive and understand the world, interact seamlessly with humans and complex environments, reason and make decisions, and execute dexterous actions in the physical world. My work broadly spans machine learning, including deep learning, reinforcement learning, and generative AI, with applications in perception, world modeling, decision-making, control, and simulation for robotics, embodied intelligence, and autonomous systems. To date, I have authored over 40 papers published in leading journals and conferences across AI, robotics, and intelligent systems.
🔥 News
- 2026.06: 🎉🎉 We will organize a workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving at CVPR 2026. I will also give a talk at From Labs to Life: Embodied Intelligence in the Wild Workshop. See you in Denver, Colorado!
- 2026.05: 🎉🎉 Two papers on efficient VLA and 3D scene reconstruction have been accepted to ICML 2026!
- 2026.03: 🎉🎉 Our paper on masked generation for traffic scenarios has been accepted to CVPR 2026 (Findings)!
- 2025.11: 🎉🎉 Our paper on regulation-aware decision-making for autonomous driving with LLM has been accepted by AAAI 2026!
- 2025.10: 🎉🎉 We organized a tutorial on Beyond Self-Driving: Exploring Three Levels of Driving Automation at ICCV 2025.
- 2025.09: 🎉🎉 I was listed on Stanford/Elsevier Top 2% Scientists list (Artificial Intelligence & Image Processing, Single-year impact)
- 2025.09: 🎉🎉 Our paper on VLA model for end-to-end autonomus driving has been accepted by NeurIPS 2025!
- 2025.06: 🎉🎉 Two papers on multi-agent cooperative perception and model training have been accepted for publication at ICCV 2025!
- 2025.05: 🎉🎉 Honored to receive the NTU MAE Best PhD Thesis Award. Grateful for the recognition and support!
- 2025.01: 🎉🎉 Our paper on generative driving policy and reinforcement learning fine-tuning has been accepted by ICRA 2025!
- 2024.12: 🎉🎉 Our paper on hybrid prediction integrated planning for autonomous driving has been accepted by TPAMI!
- 2024.09: 🎉🎉 Our paper on end-to-end driving benchmark has been accepted at NeurIPS 2024!
📝 Publications
Highlights
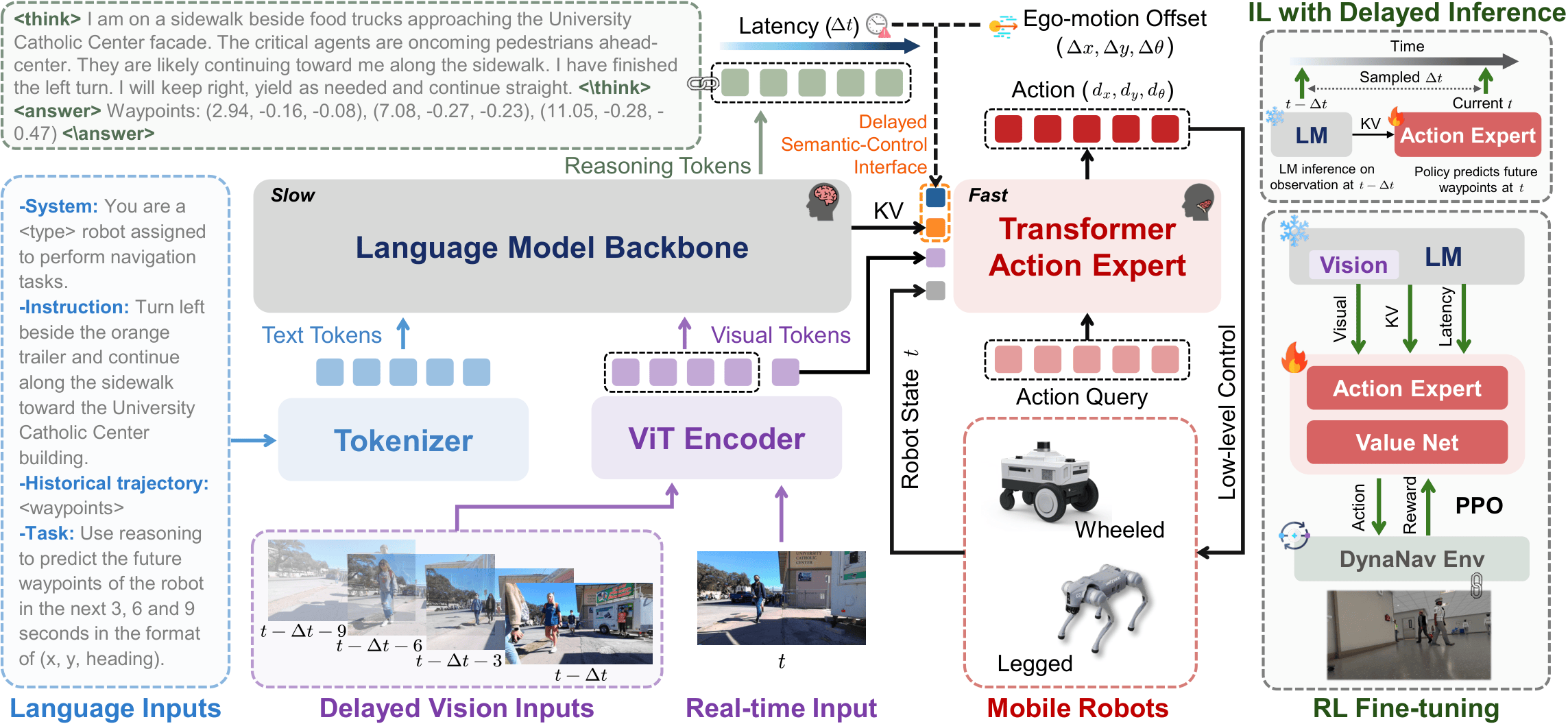
TIC-VLA: A Think-in-Control Vision-Language-Action Model for Robot Navigation in Dynamic Environments
Zhiyu Huang, Yun Zhang, Johnson Liu, Rui Song, Chen Tang, Jiaqi Ma
International Conference on Machine Learning (ICML), 2026

- We introduce Think-in-Control (TIC)-VLA, a latency-aware framework that explicitly models delayed semantic reasoning during action generation.
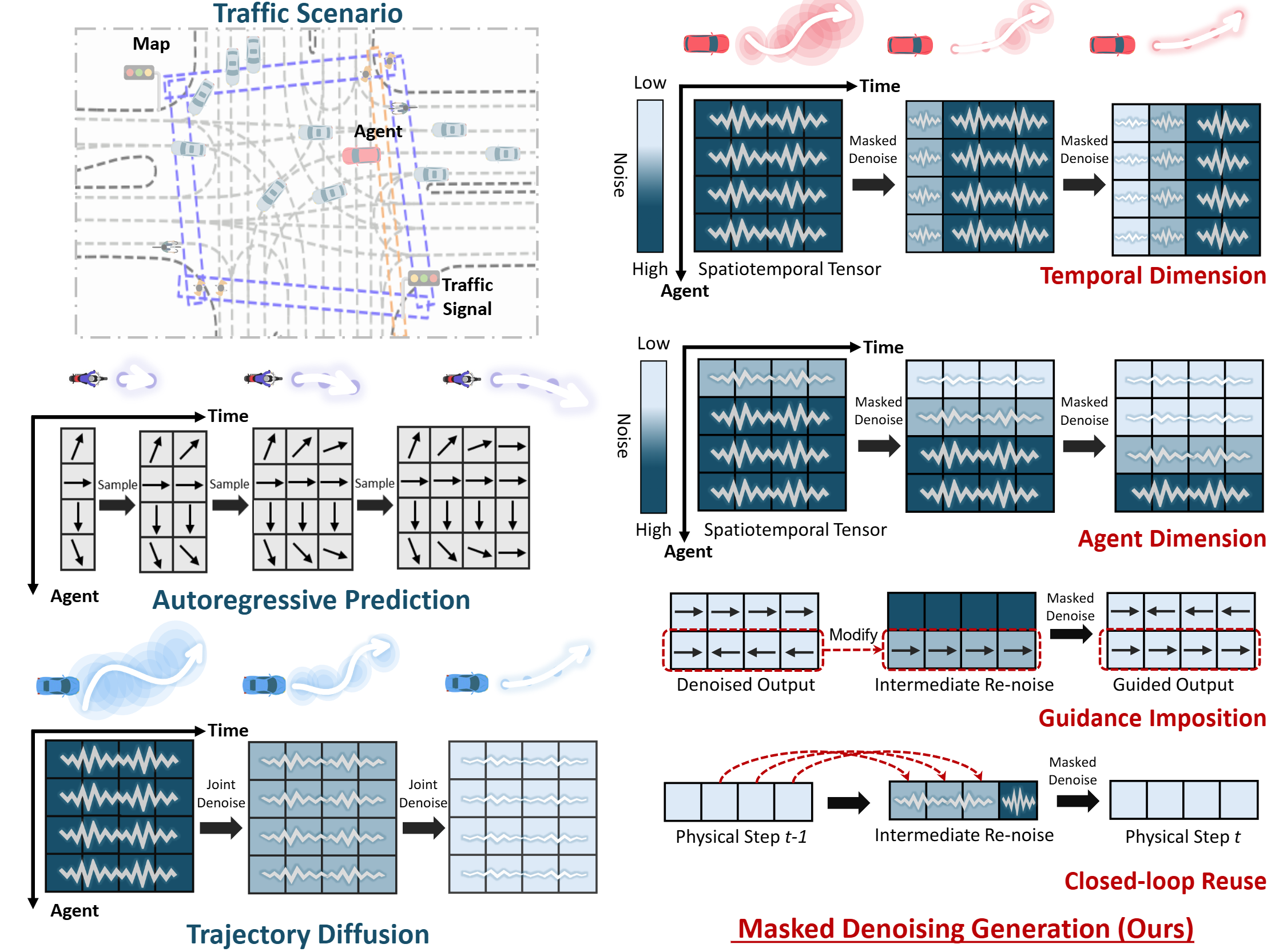
MDG: Masked Denoising Generation for Multi-Agent Behavior Modeling in Traffic Environments
Zhiyu Huang, Zewei Zhou, Tianhui Cai, Yun Zhang, Jiaqi Ma
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Findings, 2026
- We propose Masked Denoising Generation (MDG), a unified generative framework that reformulates multi-agent behavior modeling as the reconstruction of independently noised spatiotemporal tensors.
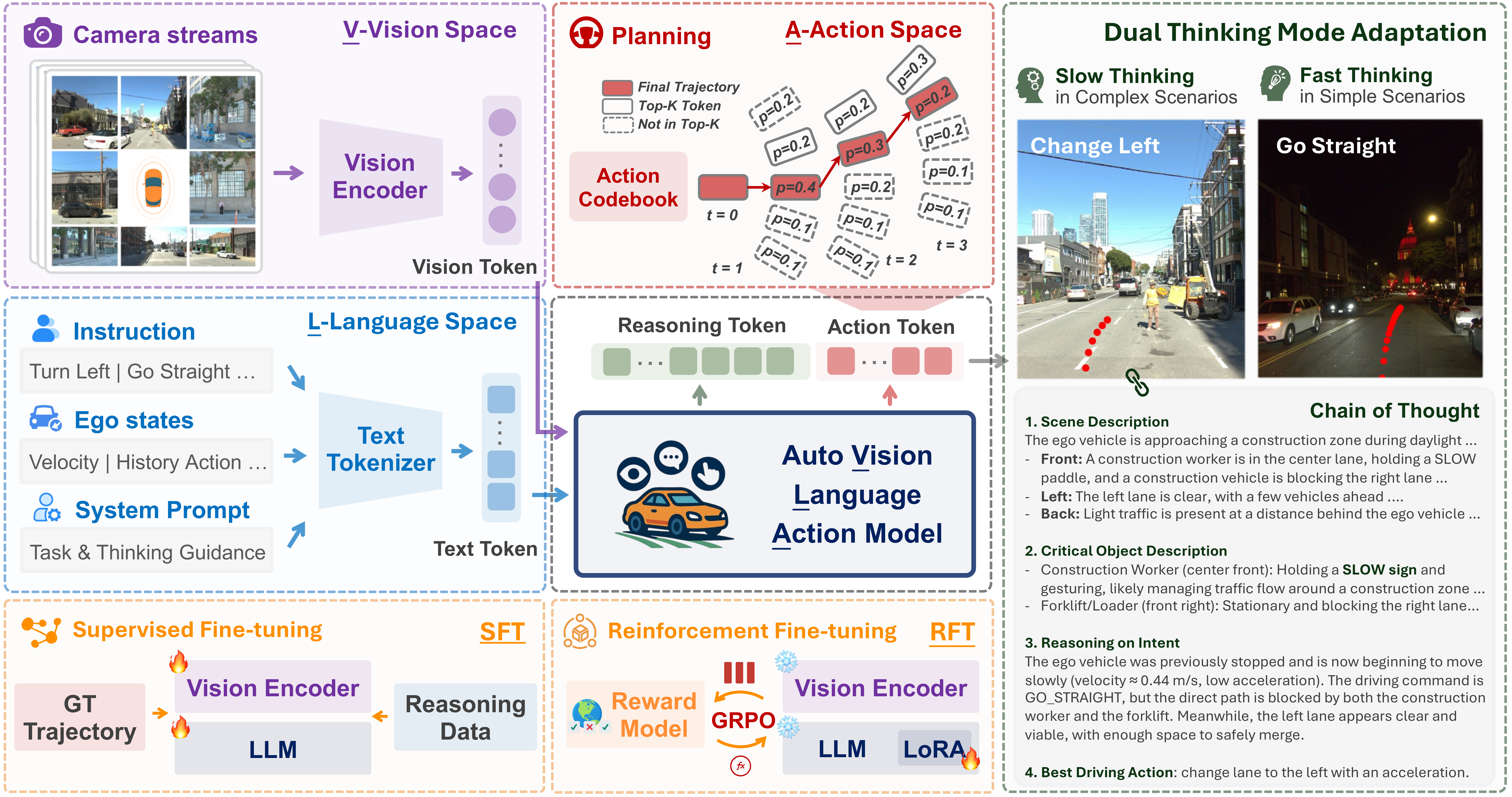
AutoVLA: A Vision-Language-Action Model for End-to-End Autonomous Driving with Adaptive Reasoning and Reinforcement Fine-Tuning
Zewei Zhou, Tianhui Cai, Seth Z. Zhao, Yun Zhang, Zhiyu Huang*, Bolei Zhou, Jiaqi Ma
Neural Information Processing Systems (NeurIPS), 2025

- We propose AutoVLA, a novel VLA model that unifies reasoning and action generation within a single autoregressive generation model for end-to-end autonomous driving.
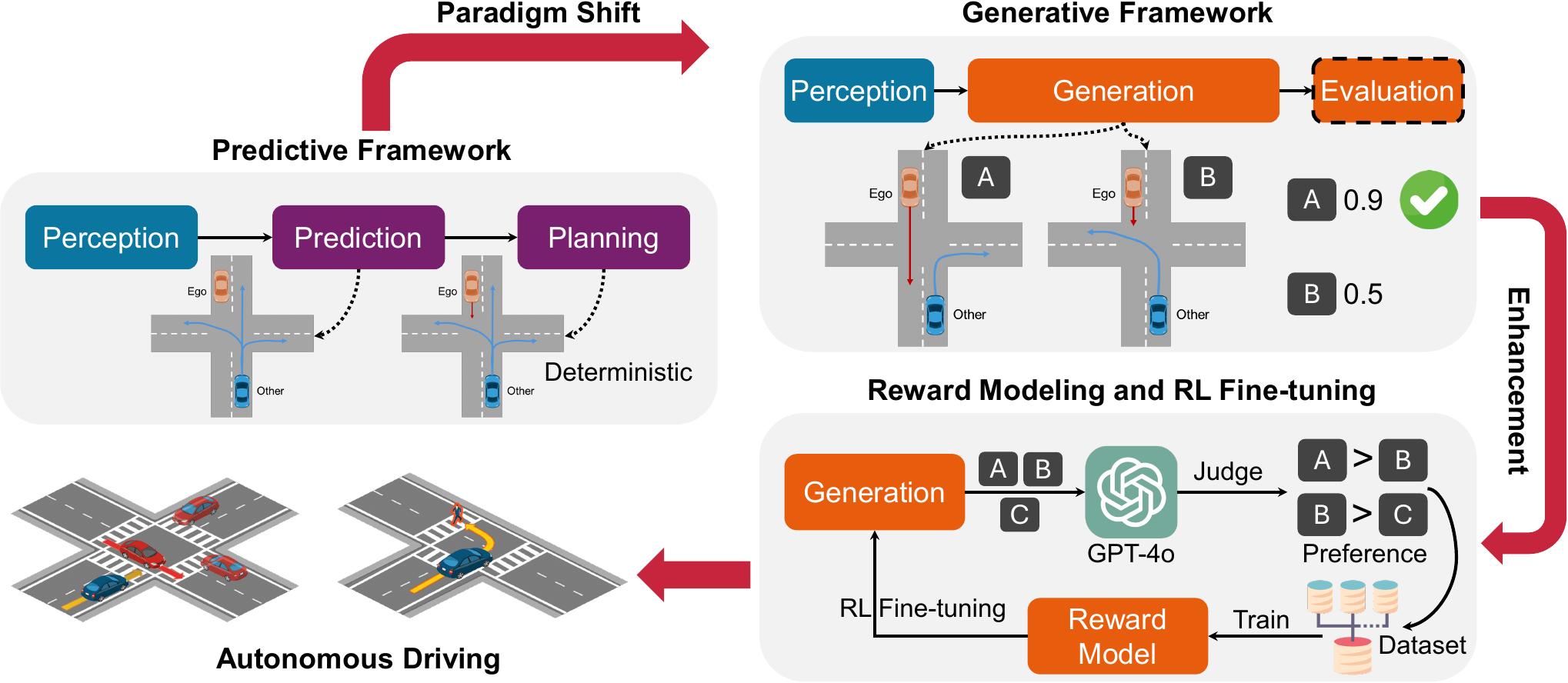
Gen-Drive: Enhancing Diffusion Generative Driving Policies with Reward Modeling and Reinforcement Learning Fine-tuning
Zhiyu Huang, Xinshuo Weng, Maximilian Igl, Yuxiao Chen, Yulong Cao, Boris Ivanovic, Marco Pavone, Chen Lv
IEEE International Conference on Robotics and Automation (ICRA), 2025
- We introduce the Gen-Drive framework, which shifts from the traditional prediction and deterministic planning framework to a generation-then-evaluation planning paradigm.
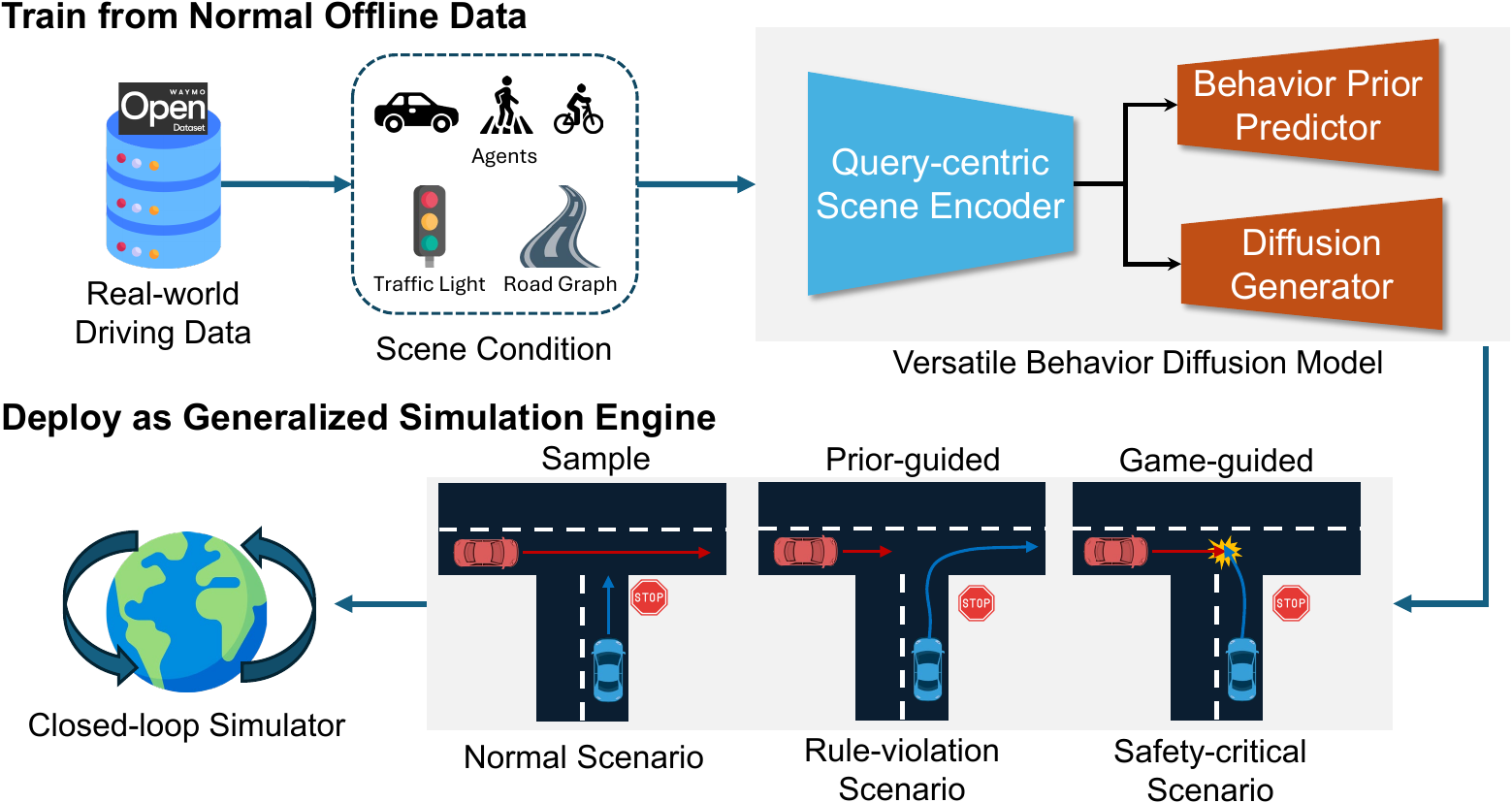
Versatile Behavior Diffusion for Generalized Traffic Simulation
Zhiyu Huang, Zixu Zhang, Ameya Vaidya, Yuxiao Chen, Chen Lv, Jaime Fernández Fisac
IEEE Transactions on Intelligent Transportation Systems, 2025

- We propose VBD, a novel traffic scenario generation framework that utilizes diffusion generative models to predict scene-consistent and controllable multi-agent interactions in closed-loop settings.
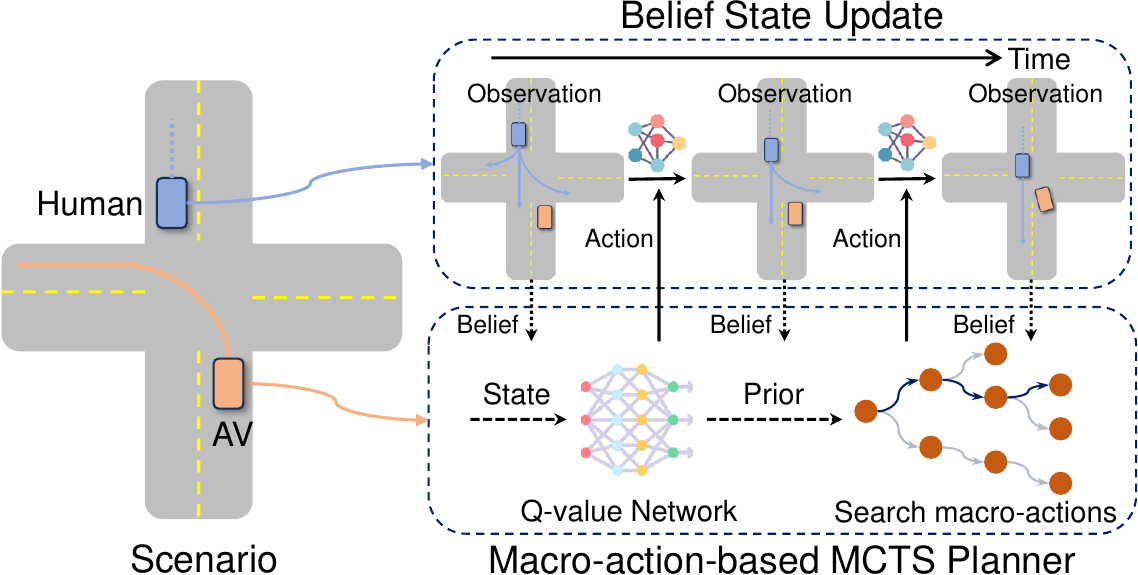
Learning Online Belief Prediction for Efficient POMDP Planning in Autonomous Driving
Zhiyu Huang, Chen Tang, Chen Lv, Masayoshi Tomizuka, Wei Zhan
IEEE Robotics and Automation Letters, 2024
- We propose an online belief-update-based behavior prediction model and an efficient planner for POMDPs. We develop a Transformer-based prediction model, enhanced with a recurrent neural memory model, to dynamically update latent belief state and infer the intentions of other agents.
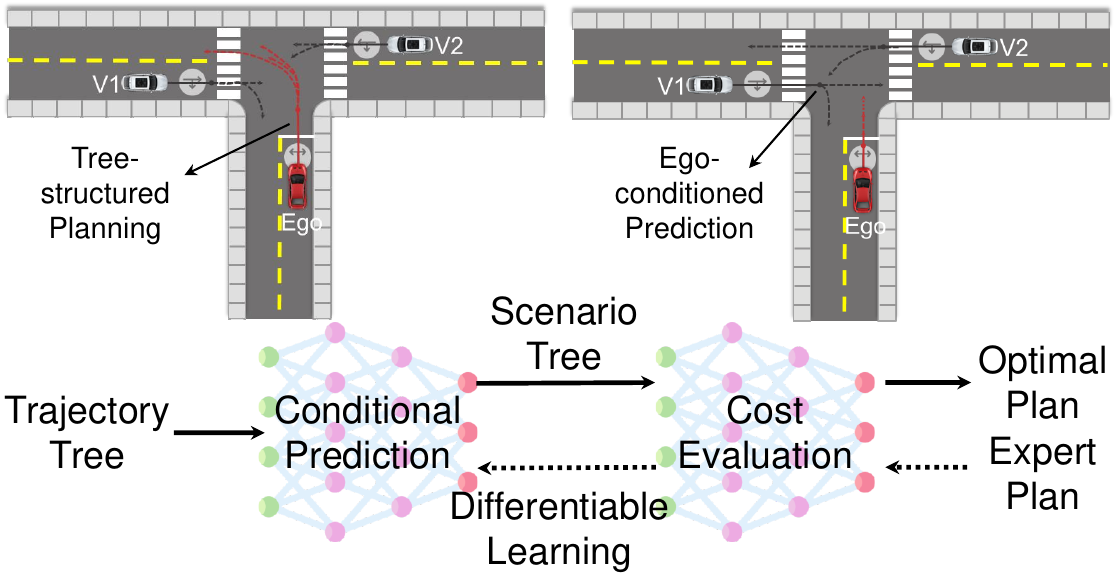
DTPP: Differentiable Joint Conditional Prediction and Cost Evaluation for Tree Policy Planning in Autonomous Driving
Zhiyu Huang, Peter Karkus, Boris Ivanovic, Yuxiao Chen, Marco Pavone, Chen Lv
IEEE International Conference on Robotics and Automation (ICRA), 2024
Paper |

- We employ a tree-structured policy planner and propose a differentiable joint training framework for both ego-conditioned prediction and cost evaluation models, resulting in a direct improvement of the final planning performance.
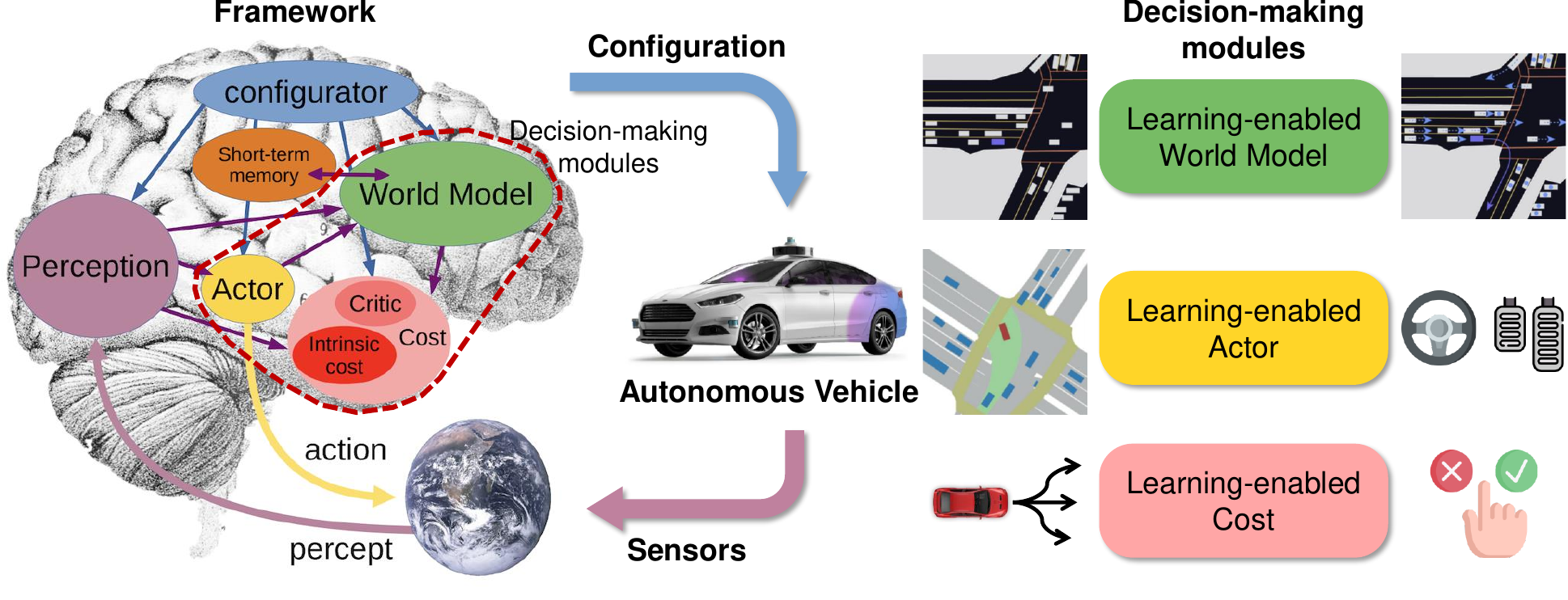
Learning-enabled Decision-making for Autonomous Driving: Framework and Methodology
PhD Thesis, 2024
- This thesis presents a comprehensive framework and a series of learning-based methodologies for decision-making in AVs, with the objective of improving the scalability, adaptability, and alignment of their decision-making systems.
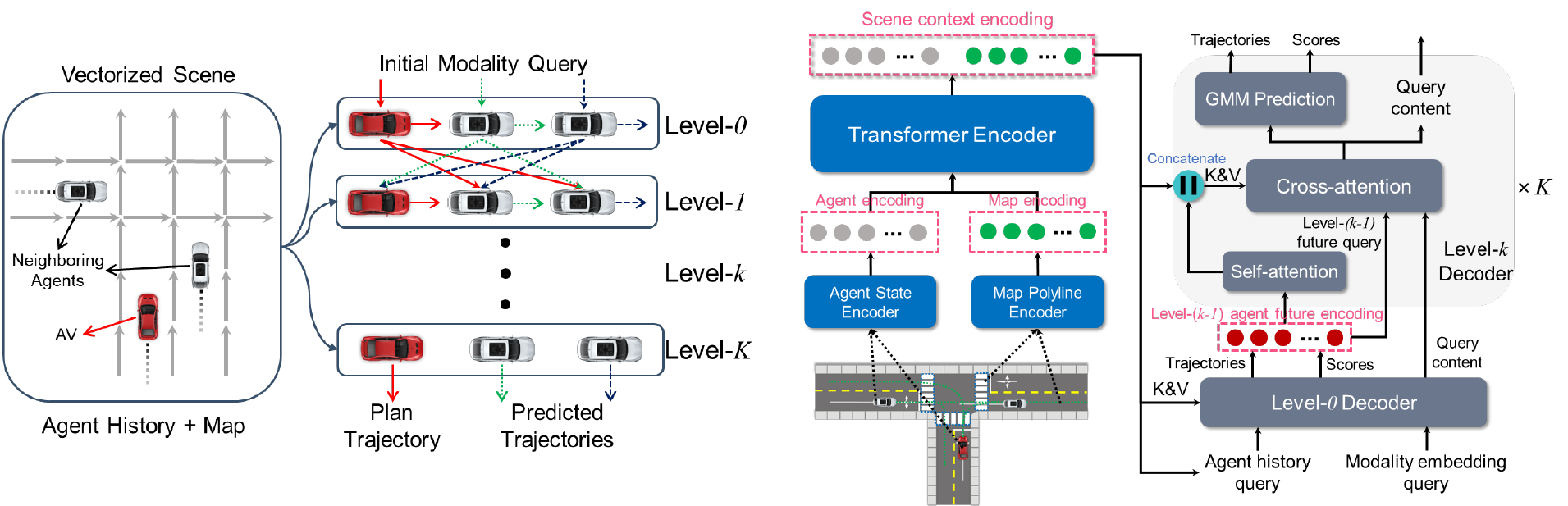
GameFormer: Game-theoretic Modeling and Learning of Transformer-based Interactive Prediction and Planning for Autonomous Driving
Zhiyu Huang, Haochen Liu, Chen Lv
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
Oral presentation (top 3%)
Paper | Project | 

- We address the interaction prediction problem by formulating it with hierarchical game theory and implementing it with TransFormer networks.
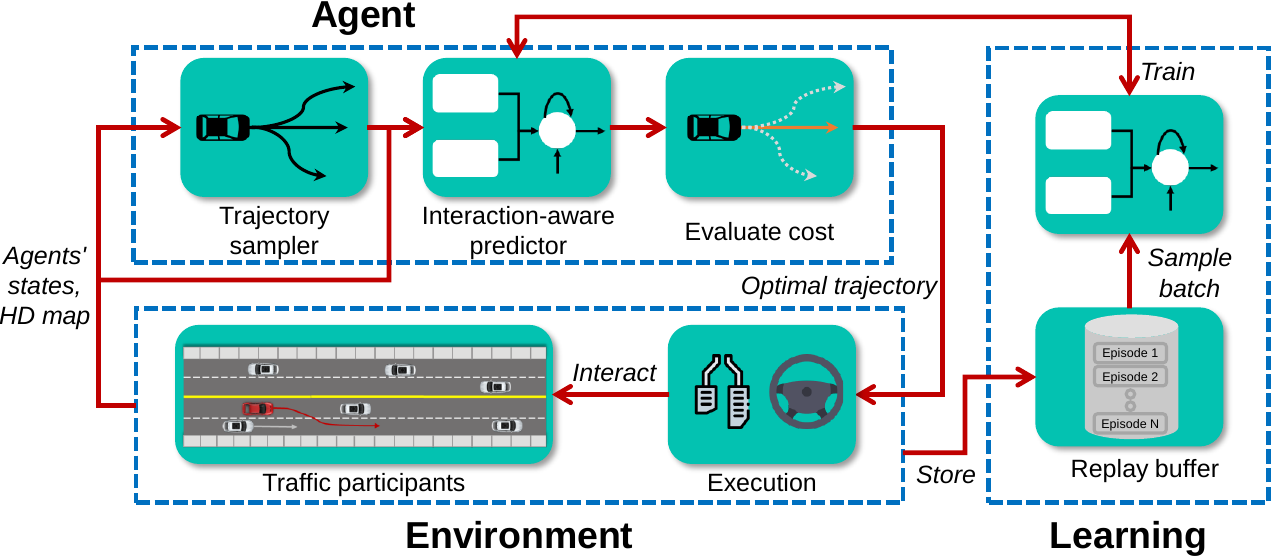
Learning Interaction-aware Motion Prediction Model for Decision-making in Autonomous Driving
Zhiyu Huang, Haochen Liu, Jingda Wu, Wenhui Huang, Chen Lv
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2023
Paper |

- We propose an interaction-aware motion prediction model that is able to predict other agents’ future trajectories according to the ego agent’s future plans, i.e., their reactions to the ego’s actions.
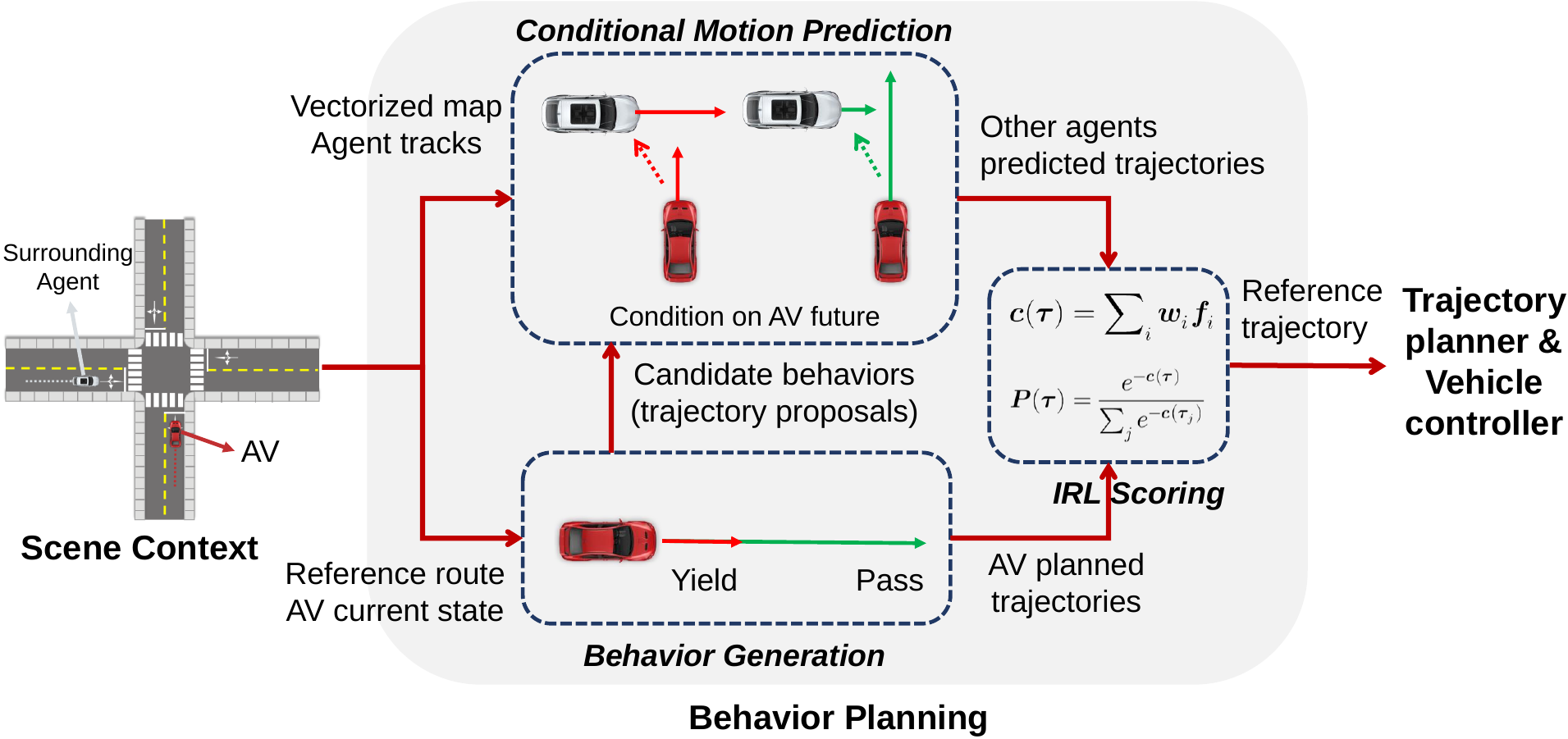
Conditional Predictive Behavior Planning with Inverse Reinforcement Learning for Human-like Autonomous Driving
Zhiyu Huang, Haochen Liu, Jingda Wu, Chen Lv
IEEE Transactions on Intelligent Transportation Systems, 2023
- Distinguished from existing learning-based methods that directly output decisions, we introduce a predictive behavior planning framework that learns to predict and evaluate from human driving data.
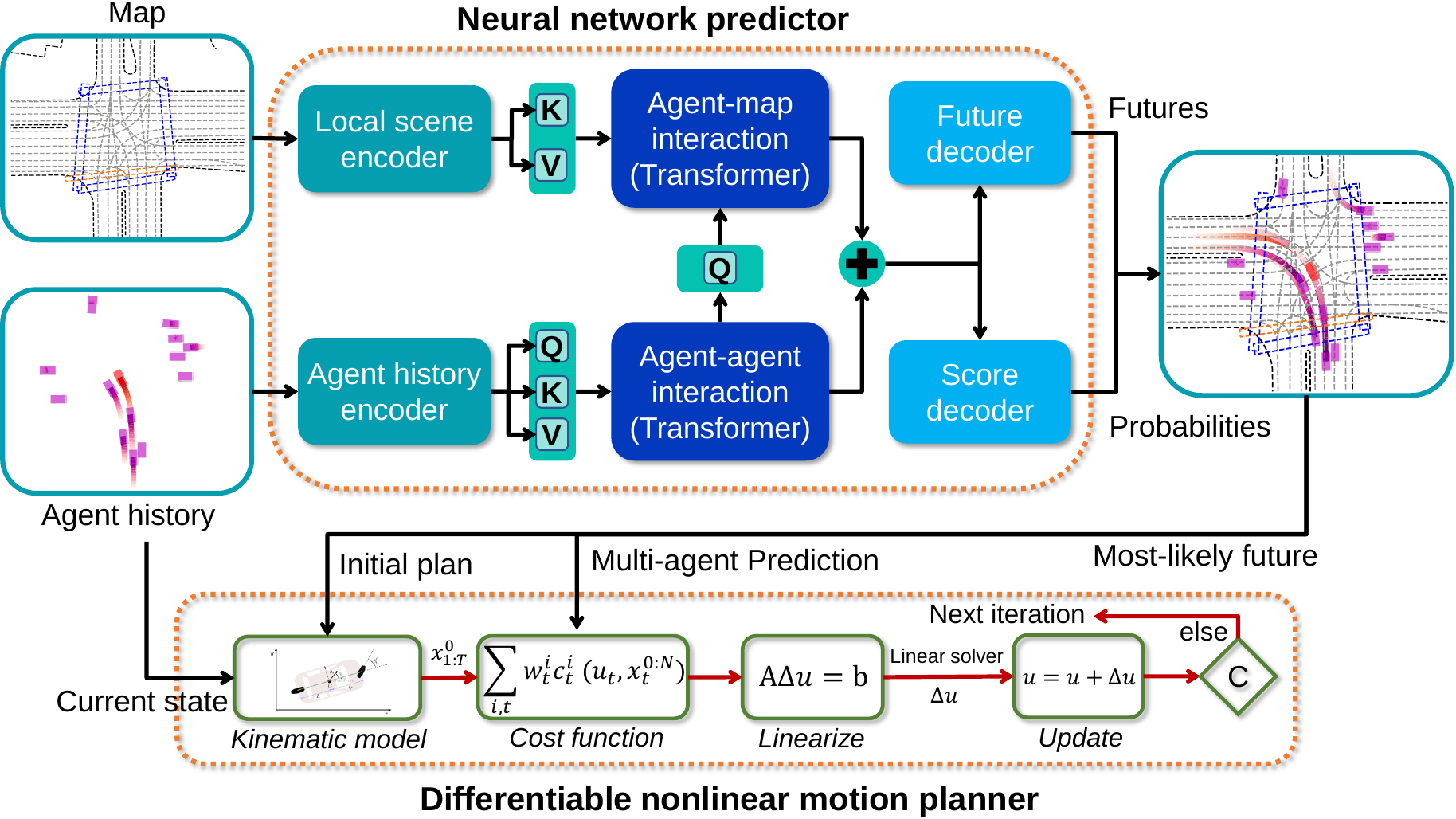
Differentiable Integrated Motion Prediction and Planning with Learnable Cost Function for Autonomous Driving
Zhiyu Huang, Haochen Liu, Jingda Wu, Chen Lv
IEEE Transactions on Neural Networks and Learning Systems, 2023

- We propose an end-to-end differentiable framework that integrates prediction and planning modules and is able to learn the cost function from data.
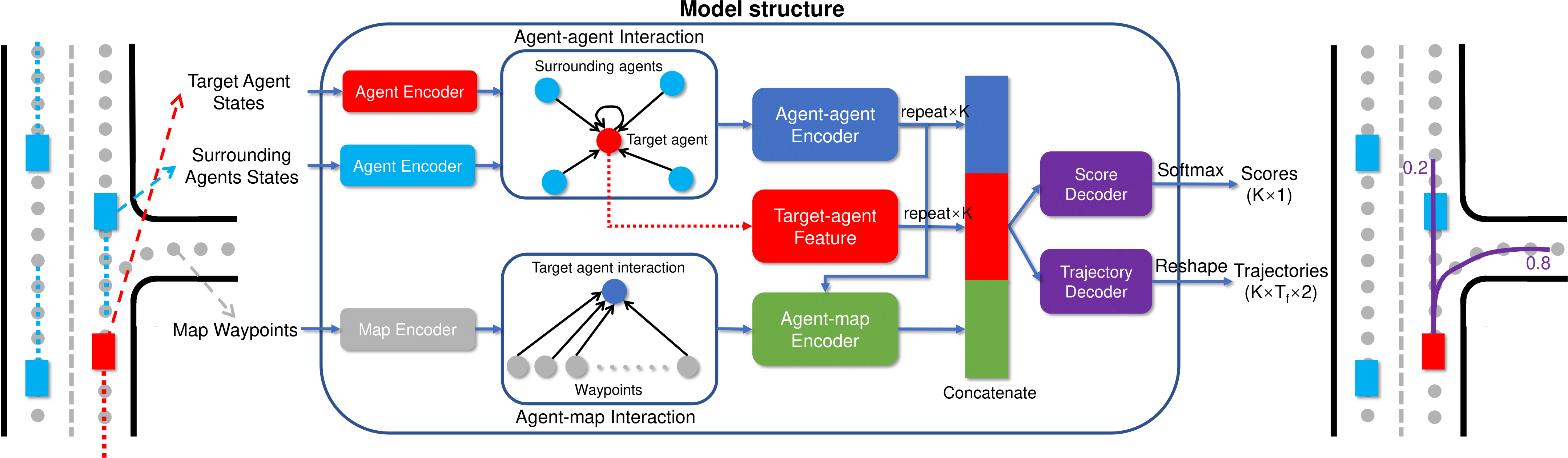
Multi-modal Motion Prediction with Transformer-based Neural Network for Autonomous Driving
Zhiyu Huang, Xiaoyu Mo, Chen Lv
IEEE International Conference on Robotics and Automation (ICRA), 2022
- We propose a neural prediction framework based on the Transformer structure to model the relationship among the interacting agents and extract the attention of the target agent on the map waypoints.
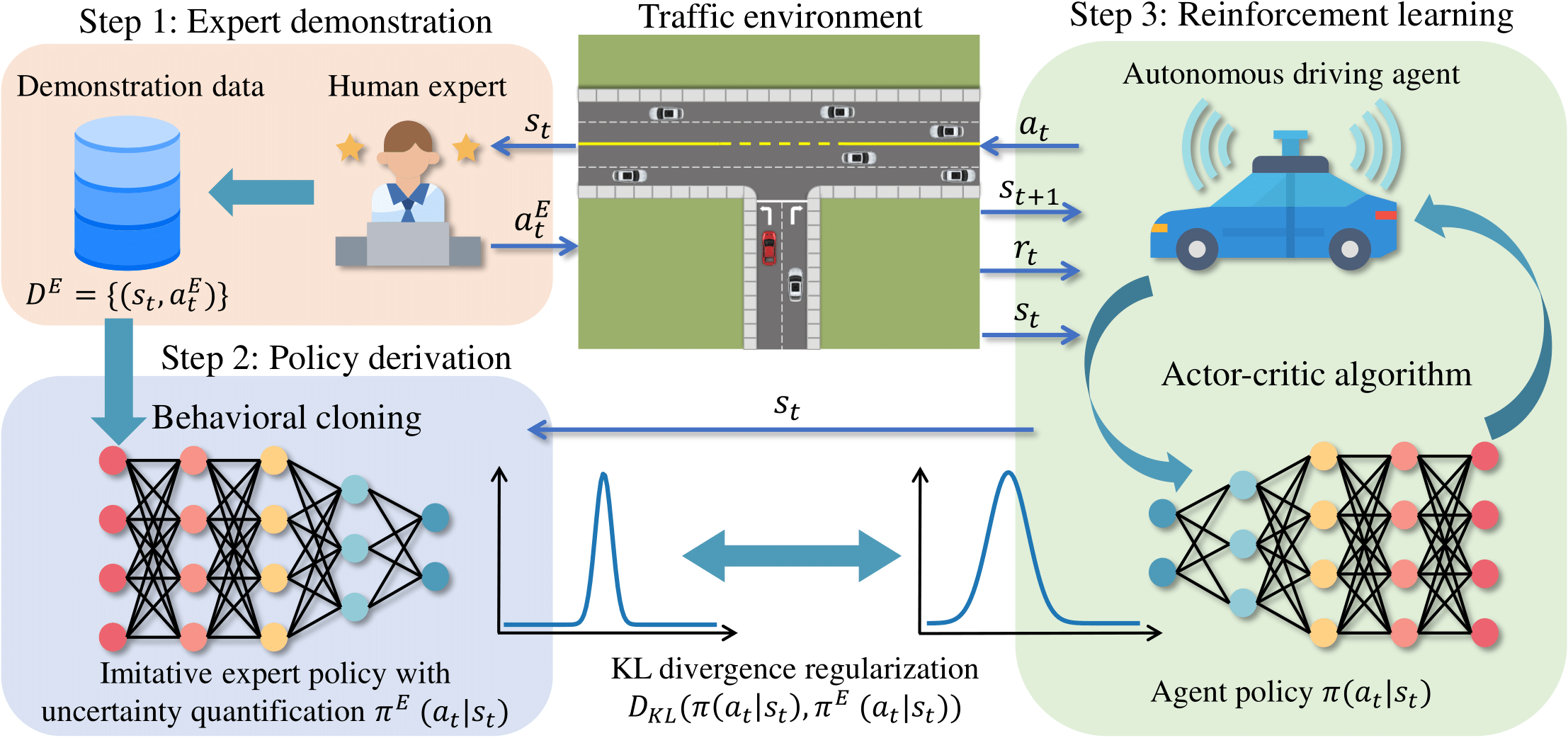
Efficient Deep Reinforcement Learning with Imitative Expert Priors for Autonomous Driving
Zhiyu Huang, Jingda Wu, Chen Lv
IEEE Transactions on Neural Networks and Learning Systems, 2022

- We propose a novel framework to incorporate human prior knowledge in DRL, in order to improve the sample efficiency and save the effort of designing sophisticated reward functions.
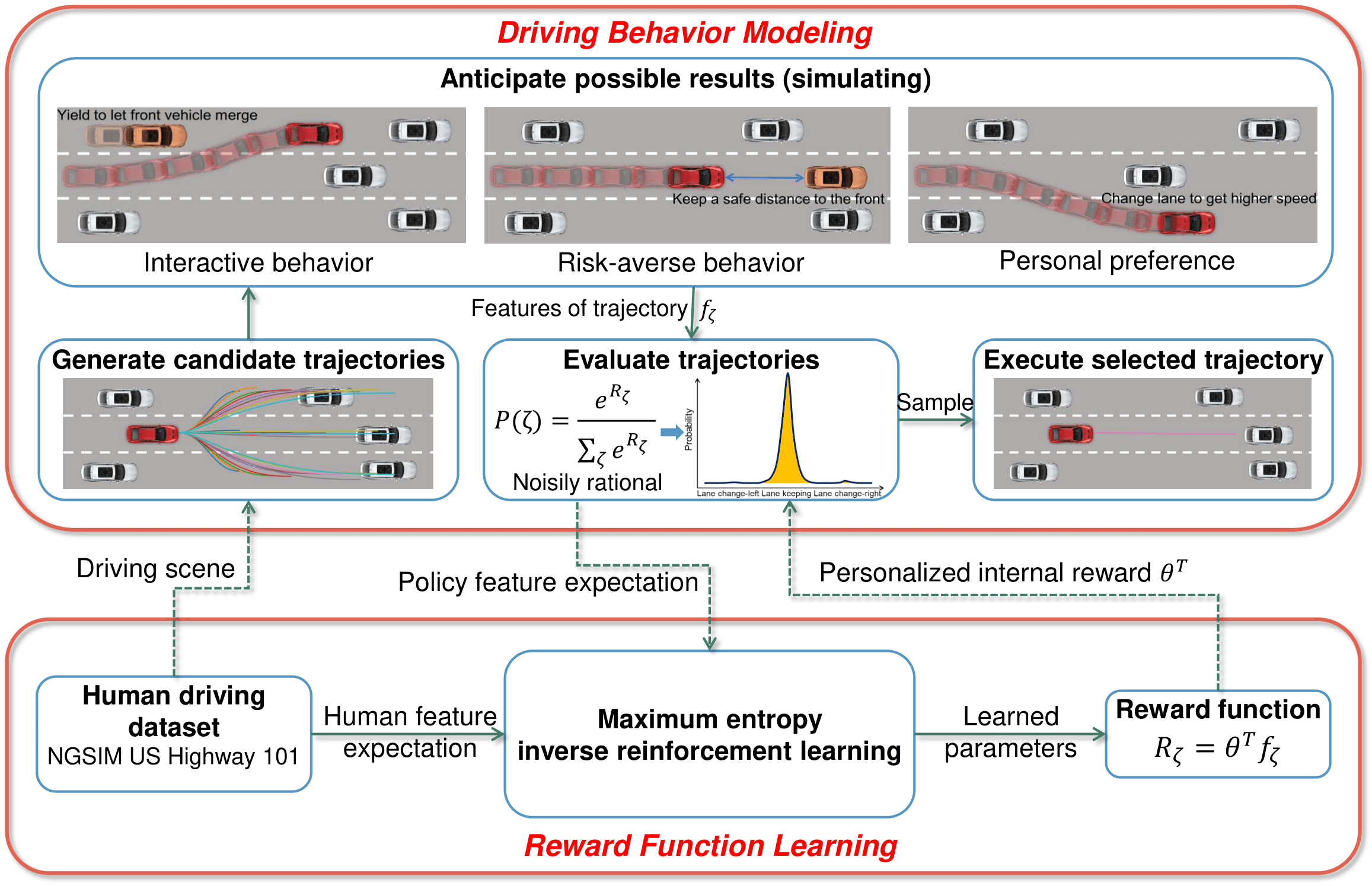
Driving Behavior Modeling using Naturalistic Human Driving Data with Inverse Reinforcement Learning
Zhiyu Huang, Jingda Wu, Chen Lv
IEEE Transactions on Intelligent Transportation Systems, 2021
Paper |

- We propose a structural assumption about internal reward function-based human driving behavior and employ sampling-based maximum entropy inverse reinforcement learning (IRL) algorithm to infer the reward function parameters from naturalistic human driving data.
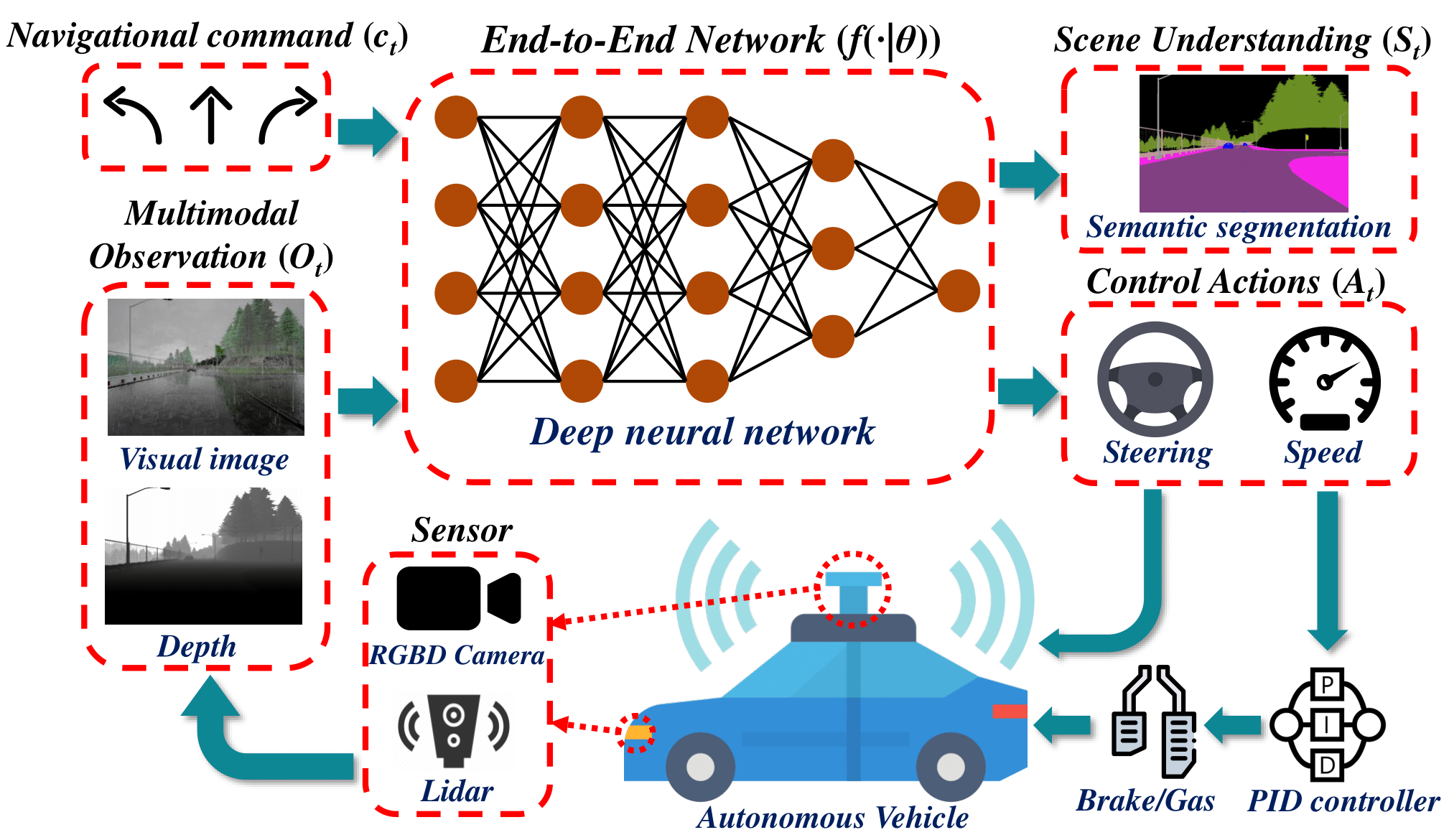
Multi-modal sensor fusion-based deep neural network for end-to-end autonomous driving with scene understanding
Zhiyu Huang, Chen Lv, Yang Xing, Jingda Wu
IEEE Sensors Journal, 2020
- We propose a novel deep neural network-based system for end-to-end autonomous driving, consisting of multimodal sensor fusion, scene understanding, and conditional driving policy modules.
All Publications
Journal
-
Hybrid-Prediction Integrated Planning for Autonomous Driving, Haochen Liu, Zhiyu Huang, Wenhui Huang, Haohan Yang, Xiaoyu Mo, Chen Lv, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
-
Safety-Aware Human-in-the-Loop Reinforcement Learning With Shared Control for Autonomous Driving, Wenhui Huang, Haochen Liu, Zhiyu Huang, Chen Lv, IEEE Transactions on Intelligent Transportation Systems
-
Augmenting Reinforcement Learning with Transformer-based Scene Representation Learning for Decision-making of Autonomous Driving, Haochen Liu, Zhiyu Huang, Xiaoyu Mo, Chen Lv, IEEE Transactions on Intelligent Vehicles, 2024
-
Transformer-Based Traffic-Aware Predictive Energy Management of a Fuel Cell Electric Vehicle, Jingda Wu, Zhiyu Huang, Chen Lv, IEEE Transactions on Vehicular Technology, 2024
-
Map-Adaptive Multimodal Trajectory Prediction via Intention-Aware Unimodal Trajectory Predictors, Xiaoyu Mo, Haochen Liu, Zhiyu Huang, Xiuxian Li, Chen Lv, IEEE Transactions on Intelligent Transportation Systems, 2023
-
Fear-Neuro-Inspired Reinforcement Learning for Safe Autonomous Driving, Xiangkun He, Jingda Wu, Zhiyu Huang, Zhongxu Hu, Jun Wang, Alberto Sangiovanni-Vincentelli, Chen Lv, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023
-
Human-Guided Reinforcement Learning with Sim-to-Real Transfer for Autonomous Navigation, Jingda Wu, Yanxin Zhou, Haohan Yang, Zhiyu Huang, Chen Lv, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023
-
Uncertainty-Aware Model-Based Reinforcement Learning with Application to Autonomous Driving, Jingda Wu, Zhiyu Huang, Chen Lv, IEEE Transactions on Intelligent Vehicles, 2022
-
Prioritized Experience-based Reinforcement Learning With Human Guidance for Autonomous Driving, Jingda Wu, Zhiyu Huang, Wenhui Huang, Chen Lv, IEEE Transactions on Neural Networks and Learning Systems, 2022
-
Towards Human-in-the-loop AI: Enhancing Deep Reinforcement Learning via Real-time Human Guidance for Autonomous Driving, Jingda Wu, Zhiyu Huang, Zhongxu Hu, Chen Lv, Engineering, 2022
-
Multi-Agent Trajectory Prediction With Heterogeneous Edge-Enhanced Graph Attention Network, Xiaoyu Mo, Zhiyu Huang, Yang Xing, Chen Lv, IEEE Transactions on Intelligent Transportation Systems, 2022
-
Personalized Trajectory Planning and Control of Lane-Change Maneuvers for Autonomous Driving, Chao Huang, Hailong Huang, Peng Hang, Hongbo Gao, Jingda Wu, Zhiyu Huang, Chen Lv, IEEE Transactions on Vehicular Technology, 2021






Conference
-
EnerGS: Energy-Based Gaussian Splatting with Partial Geometric Priors, Rui Song, Tianhui Cai, Markus Gross, Yun Zhang, Walter Zimmer, Zhiyu Huang, Olaf Wysocki, Jiaqi Ma, International Conference on Machine Learning (ICML), 2026
-
RelMap: Enhancing Online Map Construction with Class-Aware Spatial Relation and Semantic Priors, Tianhui Cai, Yun Zhang, Zewei Zhou, Zhiyu Huang*, Jiaqi Ma, IEEE International Conference on Robotics and Automation (ICRA), 2026
-
Driving with Regulation: Trustworthy and Interpretable Decision-Making for Autonomous Driving with Retrieval-Augmented Reasoning, Tianhui Cai, Yifan Liu, Zewei Zhou, Haoxuan Ma, Seth Z. Zhao, Zhiwen Wu, Xu Han, Zhiyu Huang*, Jiaqi Ma, AAAI Conference on Artificial Intelligence, 2026.
-
TurboTrain: Towards Efficient and Balanced Multi-Task Learning for Multi-Agent Perception and Prediction, Zewei Zhou, Seth Z. Zhao, Tianhui Cai, Zhiyu Huang*, Bolei Zhou, Jiaqi Ma, IEEE/CVF International Conference on Computer Vision (ICCV), 2025
-
V2XPnP: Vehicle-to-Everything Spatio-Temporal Fusion for Multi-Agent Perception and Prediction, Zewei Zhou, …, Zhiyu Huang*, Bolei Zhou, Jiaqi Ma, IEEE/CVF International Conference on Computer Vision (ICCV), 2025
-
NAVSIM: Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking, Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta, Advances in Neural Information Processing Systems (NeurIPS) Track on Datasets and Benchmarks, 2024
-
Scalable Traffic Simulation for Autonomous Driving via Multi-Agent Goal Assignment and Autoregressive Goal-Directed Planning, Xiaoyu Mo, Haochen Liu, Zhiyu Huang, Jianwu Fang, Jianru Xue, Chen Lv, IEEE Intelligent Vehicles Symposium (IV), 2024
-
Occupancy Prediction-Guided Neural Planner for Autonomous Driving, Haochen Liu, Zhiyu Huang, Chen Lv, IEEE International Conference on Intelligent Transportation Systems (ITSC), 2023
-
Multi-modal Hierarchical Transformer for Occupancy Flow Field Prediction in Autonomous Driving, Haochen Liu, Zhiyu Huang, Chen Lv, IEEE International Conference on Robotics and Automation (ICRA), 2023
-
Stochastic Multimodal Interaction Prediction for Urban Driving, Xiaoyu Mo, Zhiyu Huang, Chen Lv, IEEE International Conference on Intelligent Transportation Systems (ITSC), 2022
-
ReCoAt: A Deep Learning-based Framework for Multi-Modal Motion Prediction in Autonomous Driving Application, Zhiyu Huang, Xiaoyu Mo, Chen Lv, IEEE International Conference on Intelligent Transportation Systems (ITSC), 2022
-
Improved Deep Reinforcement Learning with Expert Demonstrations for Urban Autonomous Driving, Haochen Liu, Zhiyu Huang, Jingda Wu, Chen Lv, IEEE Intelligent Vehicles Symposium (IV), 2022



Preprint
- MIC-BEV: Multi-Infrastructure Camera Bird’s-Eye-View Transformer with Relation-Aware Fusion for 3D Object Detection, Yun Zhang, Zhaoliang Zheng, Johnson Liu, Zhiyu Huang*, Zewei Zhou, Zonglin Meng, Tianhui Cai, Jiaqi Ma, arXiv, 2025
🎖 Honors and Awards
- 2025.11 UCLA Chancellor’s Awards for Postdoctoral Research Nominee
- 2025.05 NTU MAE Best PhD Thesis Award
- 2025.01 U.S. DOT Intersection Safety Challenge Tire 1 Winner
- 2024.08 IEEE ITS Best Dissertation Award Finalist
- 2024.07 Best Paper Award, RSS 2024 workshop for Autonomous Vehicles Across Scale
- 2024.06 1st Place Winner, Waymo Open Dataset Occupancy Flow Challenge, CVPR Workshop on Autonomous Driving
- 2024.06 2rd Place Winner, Waymo Open Dataset Sim Agents Challenge, CVPR Workshop on Autonomous Driving
- 2023.09 Best Paper Runner-up Award, ITSC 2023
- 2023.06 Innovation Award, nuPlan Planning Challenge, CVPR Workshop on End-to-End Autonomous Driving | [video]
- 2023.06 3rd Place Winner, Waymo Open Dataset Motion Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2022.12 3rd Place Winner, Most Innovative Award, Driving SMARTS Competition, NeurIPS Competition Track | [slides]
- 2022.06 2nd Place Winner, Waymo Open Dataset Occupancy and Flow Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2022.03 2nd Place Winner, IEEE VTS Motor Vehicles Challenge, VPPC
- 2021.06 1st Place Winner, Waymo Open Dataset Interaction Prediction Challenge, CVPR Workshop on Autonomous Driving | [video]
- 2021.06 2nd Place Winner, Waymo Open Dataset Motion Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2019.06 Outstanding Graduate (Top 1%)
- 2018.10 National Scholarship (Top 1%)
- 2017.10 National Scholarship (Top 1%)
📖 Education
- 2019 - 2024, Doctor of Philosophy, Robotics and Intelligent Systems, Nanyang Technological University, Singapore
- 2023.07 – 2024.01, Visiting Student Researcher, University of California, Berkeley, United States
- 2015 - 2019, Bachelor of Engineering, Vehicle Engineering, Chongqing University, Chongqing, China
📚 Academic Services
Program Committee
- Lead organizer of Special Session on Learning-powered prediction and decision-making at ITSC 2023
- Lead organizer of Invited Session on Learning-powered and knowledge-driven autonomous driving at ITSC 2024
- Lead Organizer of Invited Session on Foundation-Model-Enabled Scene Understanding and Decision-Making for Autonomous Driving at ITSC 2025
- Lead organizer of Tutorial on Beyond Self-Driving: Exploring Three Levels of Driving Automation at ICCV 2025
- Lead organizer of Workshop on Foundation Models for V2X-based Cooperative Autonomous Driving at CVPR 2026
- Lead organizer of Workshop on Foundation Models for Autonomous Driving at ECCV 2026
Associate Editor
Journal Reviewer
- IEEE Transactions on Intelligent Transportation Systems
- IEEE Transactions on Neural Networks and Learning Systems
- IEEE Transactions on Intelligent Vehicles
- IEEE Transactions on Cybernetics
- IEEE Robotics and Automation Letters
- Engineering Applications of Artificial Intelligence
- Artificial Intelligence Review
Conference Reviewer
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE Intelligent Transportation Systems Conference (ITSC)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- European Conference on Computer Vision (ECCV)
- Conference on Robot Learning (CoRL)
- IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- IEEE/CVF International Conference on Computer Vision (ICCV)
- Conference on Neural Information Processing Systems (NeurIPS)
- Annual AAAI Conference on Artificial Intelligence
- International Conference on Machine Learning (ICML)